- aba13957195275@gmail.com
- +8613957195275
- +8613957195275
- Hangzhou,Zhejiang,China
Le dispositif de formation aux automates programmables en réseau GLPLC-LN comprend des composants essentiels tels qu’un automate programmable, un variateur de fréquence et un écran tactile. Il intègre un automate programmable, un éditeur de communication, un logiciel de programmation, un logiciel de configuration de contrôle industriel, un logiciel de simulation pédagogique, un boîtier de simulation et des objets réels pour la formation. Il permet de réaliser intuitivement de nombreux projets expérimentaux, comme la formation à l’utilisation de base des automates programmables, la simulation d’applications pratiques et la formation au contrôle d’objets réels. Il offre également un environnement propice à la formation pratique en conception et développement de haut niveau.
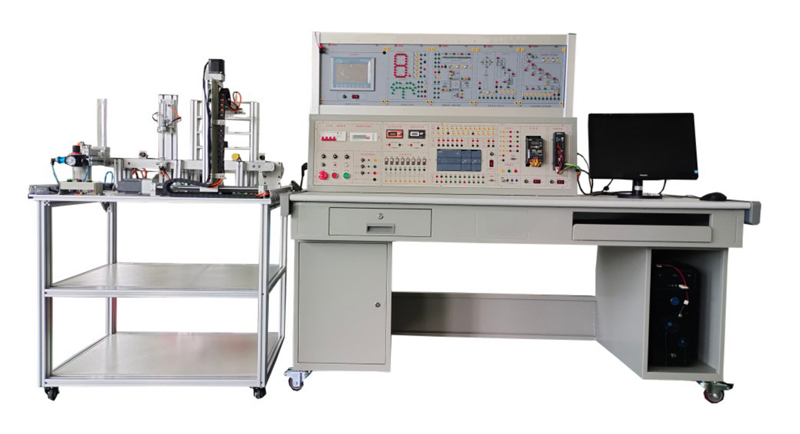
I. Présentation de l’équipement
L’équipement de formation au contrôleur programmable en réseau GLPLC-LN comprend des composants essentiels tels qu’un automate programmable, un variateur de fréquence et un écran tactile. Cet équipement intègre un automate programmable, un éditeur de communication, un logiciel de programmation, un logiciel de configuration de contrôle industriel, un logiciel d’apprentissage par simulation, un boîtier suspendu pour la formation à la simulation de contrôle et des objets réels. Il permet de réaliser intuitivement de nombreux projets expérimentaux, tels que la formation à l’utilisation de base de l’automate programmable, la simulation d’applications pratiques et la formation au contrôle d’objets réels. Il offre également des conditions optimales pour la formation expérimentale en conception et développement de haut niveau.
Après la sélection de composants de formation tels qu’un moteur asynchrone triphasé à cage d’écureuil et un relais, il permet également de réaliser de nombreux projets de formation à la commande électrique et par relais.
II. Caractéristiques de l’équipement
1. L’appareil adopte une structure modulaire, ce qui facilite le remplacement des modules expérimentaux. Pour étendre ses fonctionnalités ou développer de nouvelles expériences, il suffit d’ajouter des boîtiers suspendus de modules expérimentaux.
2. Les objets expérimentaux sont réalistes et proches des applications réelles sur les sites industriels. Grâce à la formation dispensée sur cet équipement, les étudiants peuvent s’adapter rapidement au travail sur le terrain.
3. Il utilise un automate programmable Siemens S7-1200, puissant et performant. Sa conception modulaire et sa grande flexibilité permettent aux utilisateurs de créer différents systèmes de contrôle selon leurs besoins.
4. L’apprentissage par graphiques à barres de configuration, grâce au logiciel de configuration de contrôle industriel MCGS, permet de visualiser toutes les expériences sous forme de graphiques à barres intuitifs, dynamiques et efficaces pour un suivi pédagogique dynamique.
5. Les projets expérimentaux sont complets et incluent l’affichage numérique et analogique, la régulation de vitesse à fréquence variable, l’écran tactile, la communication réseau et la commande électrique.
6. Expérience de communication réseau avec un automate programmable hôte : l’ordinateur enseignant (station maître) est équipé d’une interface de communication réseau RS485 et permet de réaliser des expériences de communication directe avec jusqu’à 16 automates programmables hôtes (esclaves) (communication 1:N). De même, n’importe quel automate programmable hôte (station maître) peut communiquer directement avec jusqu’à 7 automates programmables hôtes (esclaves) (communication N:N).
7. Formation par simulation : grâce à un environnement virtuel, la formation à la programmation, l’écriture de programmes et d’autres fonctionnalités sont affichées en temps réel.
III. Paramètres techniques
1. Alimentation : triphasée à quatre fils (ou triphasée à cinq fils) ~ 380 V ±10 % 50 Hz
2. Protection de ligne : avec protection contre les fuites de courant, les surcharges et les courts-circuits.
3. Sorties CA et CC :
3.1 Sortie CA triphasée à quatre fils 380 V, tension de sortie indiquée par trois voltmètres ;
3.2 Sortie CA 220 V via une prise de sécurité ;
3.3 Sortie d’alimentation CC régulée 24 V/2 A ;
3.4 Sortie d’alimentation CC régulée 5 V/1 A ;
3.5 Sortie d’alimentation CC régulée ±12 V/1 A (en option) ;
3.6 Sortie de tension CC réglable de 0 à 10 V ;
3.7 Sortie de courant CC réglable de 4 à 20 mA ;
4. Environnement de travail : température de -10 °C à +40 °C, humidité relative < 85 % (à 25 °C), altitude < 400 m ;
5. Puissance : < 1 kVA
6. Poids : < 150 kg
7. Dimensions : environ 1 610 mm × 720 mm × 1 600 mm
IV. Configuration et fonctions de base
Le dispositif de formation complet pour automate programmable (PLC) comprend un panneau de commande, une table de formation, un module de formation principal, un module de formation, un boîtier pour convertisseur de fréquence, un boîtier pour écran tactile, un moteur AC/DC, un bus, un module de communication, un rail de guidage moteur, un mécanisme de mesure de vitesse, etc.
(I) Panneau de commande
1. Unité de commande d’alimentation CA
L’alimentation triphasée 380 V CA à quatre fils alimente l’appareil après passage par l’interrupteur pneumatique. Le voltmètre contrôle la tension du réseau et est protégé par un fusible lumineux. L’alimentation du panneau de commande est commandée par un interrupteur à clé et un interrupteur marche/arrêt. Il comporte également un indicateur d’alarme de fuite de courant et une fonction de réinitialisation d’alarme. L’alimentation peut être fournie par un ensemble triphasé 380 V à quatre fils et un ensemble monophasé 220 V. La sortie est commandée par un interrupteur marche/arrêt et est protégée par un fusible.
2. Minuterie et enregistreur d’alarmes (en option)
La minuterie et l’enregistreur d’alarmes servent généralement d’horloge et offrent des fonctions telles que le réglage de l’heure, la programmation d’alarmes et la mise hors tension. Ils peuvent également enregistrer automatiquement le nombre d’alarmes de fuite de courant dues à des erreurs de câblage ou de manipulation.
3. Alimentation CC, voltmètre/ampèremètre CC, sortie logique et indication, etc.
Tension CC : sortie réglable de 0 à 10 V ; Courant continu : sortie réglable de 0 à 20 mA ; voltmètre/ampèremètre numérique CC ; plage du voltmètre : 0 à 200 V, impédance d’entrée : 10 MΩ, précision : 0,5 niveau ; plage de l’ampèremètre : 0 à 200 mA ; dispose également d’une sortie logique (déplacement par à-coups, verrouillage automatique).
4. Module de formation hôte
CPU Siemens S7-1200 1215C, 125 Ko de mémoire programme, 60 ns ; 2 interfaces PROFINEN intégrées ; 14 entrées/sorties numériques (DEN) et 10 sorties/sorties numériques (DOS), 2 entrées analogiques (IA) intégrées.
(II) Boîtier de formation
1. Répondeur automatique/fontaine musicale
En surveillant et en contrôlant le temps de réponse de chaque groupe d’utilisateurs dans le répondeur automatique, maîtriser la méthode de rédaction des instructions de contrôle par jugement conditionnel ; en contrôlant le débit d’eau et la musique dans la fontaine musicale, maîtriser la méthode de rédaction des instructions en boucle.
2. Chaîne de montage / Feu de circulation
En contrôlant le processus de traitement séquentiel de la chaîne de production et le feu de circulation, maîtriser la méthode de rédaction des instructions de contrôle séquentiel.
3. Niveau d’eau du château d’eau / Éclairage de la tour
En analysant l’évolution du niveau d’eau du château d’eau et du réservoir, comprendre la méthode de rédaction des instructions de contrôle logique simples. En contrôlant le clignotement de l’éclairage de la tour, maîtriser la méthode de rédaction des instructions de registre à décalage.
4. Alimentation et chargement automatiques / Convoyeur à quatre sections
En contrôlant le démarrage et l’arrêt du convoyeur, son état de transmission, ainsi que le sens et le débit des marchandises dans le système d’alimentation et de chargement automatiques, maîtriser la méthode de rédaction des instructions de contrôle logique plus complexes.
5. Dispositifs de mélange de liquides
En contrôlant les proportions des différents liquides dans le dispositif de mélange et la durée de mélange, maîtriser les méthodes de rédaction des instructions conditionnelles et des instructions de temporisation.
6. Distributeur automatique
En identifiant le nombre de pièces insérées par l’utilisateur et en contrôlant l’entrée et la sortie de divers produits dans le distributeur automatique, maîtriser les méthodes de rédaction des instructions de comptage et des instructions de comparaison de sortie.
7. Laminoir automatique/Trieuse de courrier
En identifiant la quantité et le type de matériaux entrants du laminoir automatique et de la trieuse de courrier, et en contrôlant la séquence de démarrage et d’arrêt des différents actionneurs (tels que les moteurs), maîtriser les méthodes de rédaction des instructions d’opération numérique et des instructions d’interruption.
8. Commande de robot/Mouleuse automatique
En contrôlant la position du robot et la position du cylindre de la mouleuse automatique dans toutes les directions, maîtriser la capacité à écrire un programme de commande logique relativement simple dans un système d’application industrielle complet.
9. Centre d’usinage
En contrôlant le sens de rotation du moteur dans chaque direction du centre d’usinage, ainsi que le processus d’entrée/sortie et de changement d’outils dans le magasin d’outils, maîtriser la capacité à écrire des commandes logiques plus complexes dans un système d’application industrielle complet.
10. Ascenseur à quatre étages
En contrôlant un modèle complet d’ascenseur à quatre étages, vous pouvez vous familiariser avec les principes de base de l’analyse d’un système de contrôle par automate programmable (PLC), l’affectation des entrées/sorties, la conception du schéma de câblage des entrées/sorties, le câblage, la programmation, le débogage, etc.
11. Moteur pas à pas/Mouvement linéaire : (physiquement) un système de moteur pas à pas comprend un circuit de commande, un moteur pas à pas, un cadran, une aiguille, etc. ; un système de mouvement linéaire comprend un moteur, une courroie synchrone, un capteur photoélectrique, un rail de guidage, un bloc mobile, etc. En utilisant un automate programmable (PLC) pour contrôler le moteur pas à pas et le module physique de mouvement linéaire, vous pouvez vous familiariser avec le contrôle du sens de rotation et de la fréquence d’impulsion du moteur pas à pas, ainsi qu’avec la détection et le contrôle de positionnement du mouvement linéaire.
12. Machine à laver automatique / Ligne de production de galvanoplastie
En contrôlant les temps d’immersion et de vidange de la machine à laver, le processus de lavage ainsi que le temps, la méthode et la séquence de traitement des pièces dans la ligne de production de galvanoplastie, vous pouvez maîtriser l’application complète d’un système de contrôle PLC multipoint.
13. Contrôle de moteur CC / contrôle de température (contrôle analogique)
Maîtrisez l’utilisation des instructions de comptage rapide, des instructions de traitement analogique et des instructions PID grâce à l’acquisition de signaux d’impulsion, au contrôle de vitesse (tension) et aux paramètres de température dans un système de moteur CC.
14. Unité pratique de contrôle de moteur typique
Comprend 3 contacteurs CA Schneider, 1 relais temporisé, 3 boutons, 3 voyants CA, 2 relais thermiques et un socle pour composants. Maîtrisez les connaissances relatives à l’installation et à la mise au point des systèmes haute tension généraux et réalisez le contrôle de fonctionnement typique des moteurs en mode PLC ; acquérez les connaissances nécessaires à l’installation et à la mise au point des systèmes de contrôle électrique PLC.
15. Carte maillée
Apprentissage des processus de planification, d’installation et de dépannage des différents composants des systèmes de commande électrique.
16. Module de formation sur convertisseur de fréquence
Configuré avec un convertisseur de fréquence Siemens MM420 de 0,37 kW, une interface de communication RS485 et un panneau de commande BOP, ce module permet une application complète des convertisseurs de fréquence, la compréhension pratique de la régulation de vitesse par conversion de fréquence et la maîtrise de la méthode d’établissement et de connexion du protocole de communication USS entre le convertisseur de fréquence et l’automate programmable.
17. Module de formation sur écran tactile : écran couleur 7 pouces TPC7062
Compréhension des fonctions et de l’utilisation des écrans tactiles industriels, maîtrise de la communication avec l’automate programmable et maîtrise des méthodes de mise en œuvre des touches de réinitialisation, de configuration et de fonction alternative, de l’affichage graphique (courbe) et du suivi d’image dynamique sur les écrans tactiles.
(III) Rails de guidage de moteur, système de mesure de vitesse par codeur optique et tachymètre numérique
Comprend un système de mesure de vitesse par codeur optique, un tachymètre numérique et des rails de guidage pour la fixation des moteurs. Les rails de guidage présentent une excellente planéité, sont exempts de déformation sous contrainte, bénéficient d’une finition soignée, d’une concentricité optimale, d’une grande interchangeabilité, d’un faible niveau sonore du moteur et de paramètres d’entraînement typiques, répondant ainsi au mieux aux exigences de la formation. Un tachymètre numérique, intégré au panneau de commande du rail, affiche la vitesse instantanée et dispose d’un signal de retour de tension. Il est également équipé d’une sortie de signal de codage photoélectrique à deux canaux (A et B), permettant des exercices de positionnement et d’ouverture/fermeture à différentes vitesses.
(IV) Moteur asynchrone triphasé à cage d’écureuil : 380 V CA / △
(V) Table de formation
La table de formation est constituée d’une structure en fer à double paroi, revêtue d’une peinture mate à motif dense. Son plateau est en panneau haute densité ignifugé, imperméable et résistant à l’usure. Deux grands tiroirs verrouillables, situés à gauche et à droite, permettent de ranger outils et matériaux. La table, conçue d’un seul bloc, offre un design élégant et épuré. V. Projets de formation pour les équipements de formation aux automates programmables en réseau
(I) Formation aux compétences de base en automates programmables
1. Formation théorique sur les automates programmables (structure logicielle et matérielle, composition du système, exercices d’instructions de base, câblage, téléchargement de programmes, etc.)
2. Formation pratique à la commande de moteurs (mouvement par à-coups, autoblocage, marche avant/arrière, démarrage étoile-triangle, etc.)
3. Formation à la simulation d’automates programmables
(II) Formation aux applications de commande analogique d’automates programmables
4. Commande d’affichage numérique
5. Commande de réponse (priorité, calcul numérique, avec effet sonore)
6. Commande d’éclairage de tour (clignotement, émission, jet d’eau)
7. Commande de fontaine musicale (avec effet sonore)
8. Commande de feux de signalisation
9. Contrôle du niveau d’eau du château d’eau
10. Commande d’un système d’alimentation et de chargement automatique
11. Commande d’un convoyeur à quatre sections
12. Commande d’une chaîne de montage
13. Commande d’un mélangeur de liquides multiples
14. Commande d’une machine de moulage automatique
15. Commande d’une machine à laver entièrement automatique (avec effet sonore)
16. Commande d’une ligne de production de galvanoplastie
17. Laminoir automatique Commande
18. Commande d’une machine de tri du courrier
19. Commande d’un distributeur automatique
20. Commande d’un robot
21. Commande d’un ascenseur à trois étages
22. Commande d’un ascenseur à quatre étages (objet réel)
23. Commande d’un centre d’usinage (objet réel)
(III) Formation à la commande physique par automate programmable (PLC)
24. Reconnaissance de position, contrôle de trajectoire et de positionnement pour mouvements linéaires
25. Commande de moteur pas à pas
26. Commande de moteur à courant continu
27. Régulation PID de température
(IV) Formation complète aux applications PLC, variateur de fréquence et écran tactile
28. Paramétrage et utilisation du variateur de fréquence
29. Fonctions d’alarme et de protection du variateur de fréquence
30. Commande par impulsions à bornes externes
31. Commande de rotation avant/arrière du moteur par variateur de fréquence
32. Régulation de vitesse par conversion de fréquence à sélection multiple
33. Régulation de vitesse continue par variateur de fréquence
34. Régulation de vitesse par conversion de fréquence basée sur la commande d’une grandeur analogique externe (tension/courant)
35. Commande de démarrage instantané en cas de coupure de courant
36. Régulation de vitesse par conversion de fréquence PID
37. Commande par automate programmable (PLC) de la rotation avant/arrière du moteur par variateur de fréquence à bornes externes
38. Commande de la durée de fonctionnement du moteur par variateur de fréquence à bornes externes
39. Commande multi-vitesses basée sur la commande numérique par automate programmable (PLC)
40. Régulation de vitesse en boucle ouverte par conversion de fréquence basée sur la commande analogique par automate programmable (PLC)
41. Régulation de vitesse en boucle ouverte par convertisseur de fréquence basée sur la communication avec l’automate programmable (PLC)
42. Boucle fermée de vitesse Commande basée sur la communication PLC
43. Régulation de vitesse en boucle fermée d’un convertisseur de fréquence basée sur une grandeur analogique PLC
44. Simulation d’un système d’alimentation en eau à pression constante par convertisseur de fréquence
45. Exercices de programmation d’instructions de base basés sur une commande tactile
46. Commande de LED basée sur une commande tactile
47. Régulation PID de la température basée sur une commande tactile
48. Commande de communication entre PLC, écran tactile et convertisseur de fréquence
49. Technologie de communication réseau de bus de terrain basée sur MCGS



